|
Autoguida universale con WebCam - Pag.04
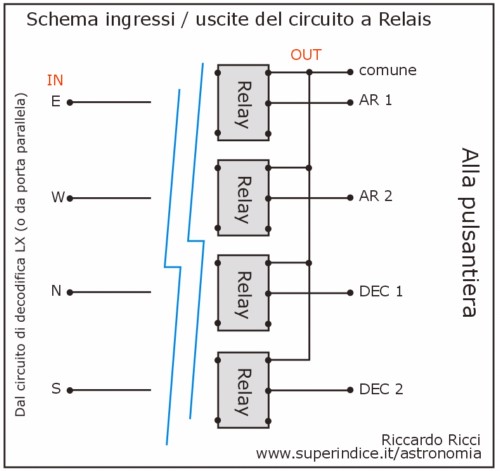
Collegamento finale
Lo schema che segue e' semplificato e mostra solo gli ingressi e le uscite
del circuito a relais. I collegamenti proposti sono validi per le
pulsantiere che usano un "comune" come quella dell'esempio.
I comandi N,E,S,W sono ovviamente i 4 punti cardinali e corrispondono
ai 4 tasti della pulsantiera.
E' possibile che alcuni movimenti risultino invertiti e vi consiglio
di compiere alcune prove con il vostro sistema web-cam / telescopio
prima di saldare i fili relativi ai movimenti.
Considerate anche che la web-cam dovrebbe essere innestata sempre nella
stessa posizione rispetto al portaoculare in modo tale da rispettare e seguire
sempre gli stessi movimenti di controllo.
Tuttavia quasi tutti i programmi di autoguida permettono lo "swap" degli assi
e dei movimenti e in teoria non c'e' modo di sbagliare nel collegamento dei fili.
Se il programma che decidete di usare non dispone di questa funzione, potete sempre
usare uno o piu' deviatori a doppio scambio per compiere manualmente l'operazione
di swap.
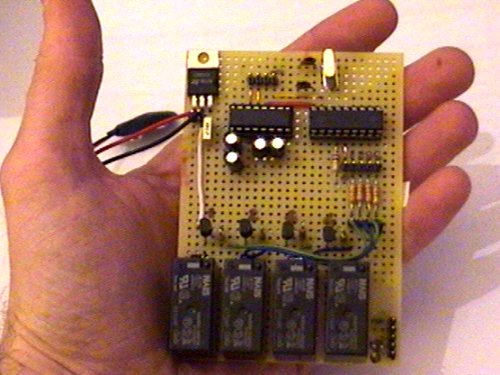
Il circuito montato
Le figure che seguono mostrano il circuito completo montato su una basetta multiforo.
Il circuito e' abbastanza compatto e puo' essere facilmente inscatolato in un piccolo
contenitore.
Da notare i pin che ho installato sul circuito per usare dei connettori per i cavi
di collegamento seriale e alla pulsantiera.
Tale soluzione si è resa necessaria solo per l'utilizzo con la mia combinazione
di alimentazione e di voltaggio dei relais.
Se anche voi doveste notare qualche problema di pronta attivazione dei relais, abbassate
il valore di tali resistenze.
Da ricordare
Conclusione
Spero di essere stato chiaro nell'esposizione di questo progetto e che la sua realizzazione
possa essere di aiuto a tutti gli appassionati astrofotografi che non dispongono di un
vero sistema di guida.
Ringrazio tutti voi per avermi seguito fino a questo punto e un ringraziamento particolare va fatto
agli amici della mailing-list "motoriVB" e all'amico Carlo Martinelli che mi ha spinto alla
sperimentazione e realizzazione di questo progetto, primo passo di un piu' grande e importante
sistema indipendente che si sta sviluppando proprio con tutti gli amici di MotoriVB.
Ciao a tutti.
Torna alla pagina precedente
(c) 2001 Riccardo Ricci - info @ metaseen . com
|