|
Controller 2.0 !
Il mio nuovo controller per l'inseguimento
Dopo aver acquistato il telescopio guida e aver realizzato il relativo supporto (vedi relativa pagina)
ho pensato di rendere piu' agevole la guida utilizzando la telecamerina in b/n e il piccolo monitor Epson che avete gia' conosciuto
nelle altre pagine del sito.
Ma per poter guidare con precisione oltre al moto orario ho previsto qualche correzione anche in declinazione per compensare qei normali
errori di allineamento: e' nato cosi' il mio Controller 2.0, ovvero di seconda generazione(!), che unisce una nuova meccanica e una nuova parte elettronica.
Procediamo con ordine:
Questo accorgimento ha permesso di ridurre notevolmente il numero di giri necessari al motore per l'inseguimento,
facendo diminuire di conseguenza quelle fioche vibrazioni che di tanto in tanto accompagnavano il movimento.
Sempre in tema meccanico, ho usato un altro attuatore per il controllo della declinazione ma, udite udite, anziche' usare un
motore passo-passo ho usato il motore in c/c gia' presente all'interno della scatola nera!
Ho ovviamente eliminato il potenziometo interno per liberare la corsa degli ingranaggi (vedi qui per i dettagli)
Ho scelto questa soluzione, rapida ed efficace, in quanto i movimenti di correzione della declinazione non sono
tanto frequenti e la grande riduzione dell'attuatore, unita ad un regolatore di tensione per il motore, permette
di avere ottimi risultati ad un costo molto basso.
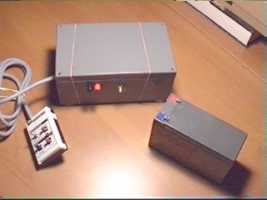
Ho quindi assemblato una scatola contenente:
A questa scatola ho collegato una pulsantiera con diversi metri di cavo per controllare l'inseguimento a distanza, dal monitor.
La pulsantiera ha led che indica l'attivazione del moto AR, un pulsante di STOP del moto, un pulsante di avanzamento rapido del moto.
Sopra, si trova il controllo della correzione della declinazione, con un deviatore per determinare il senso della correzione e un pulsante
per attivare i movimenti.
Il tutto e' alimentato dalla mia fidata batteria al piombo (da 12V-7A pagata 37mila lire)
che alimenta anche il monitor e il CCD. In questo modo si e' liberi dai vincoli della rete elettrica
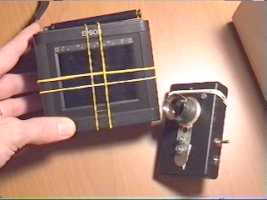
e dal PC. Il CCD e' quello della solita telecamerina in b/n, mentre il monitor e' stato "reticolato" con dei semplici elastici per
rendere la guida piu' precisa.
La telecamerina viene montata sul telescopio guida con la sua brava Barlow 2x, per ottenere un maggiore ingrandimento e precisione di guida.
Il circuito elettrico di controllo del passo-passo e' lo stesso presentato nella sezione Motorizzarsi senza PC - Progetto 2
con l'aggiunta del pulsante di avanzamento veloce (messo in parallelo al trimmer) a sua volta dotato di un altro trimmer da 100 KOhm, inserito per poter
regolare anche la velocita' dell'avanzamento veloce.
Il circuito di controllo del motore in c/c usato per la declinazione e' un kit di Nuova Elettronica (in fondo a questa pagina trovate i dati per poterlo ordinare)
ma ne esistono tanti altri simili, in kit o gia' montati, presso molti negozi di elettronica.
Riepilogo
La pulsantiera permette quindi di interrompere il moto AR o di aumentarne leggermente la velocita' per correggere gli eventuali errori di inseguimento.
Inoltre, permette di agire sulla declinazione per correggere gli eventuali errori su quest'asse, causati da un non preciso allineamento polare.
Non giudicate la confusione della scatola! Essendo un prototipo e' un po' caotica e le parti fissate sono solo quelle di sinistra...
La parte di destra e' ancora appoggiata per essere a breve modificata e in parte rimpiazzata da un nuovo circuito con QUARZO che garantira'
una precisione del moto orario ancora maggiore. (A breve seguiranno i dettagli sempre su questo sito!).
Come sempre, per maggiori informazioni potete contattarmi direttamente info @ metaseen . com
(c) 2000 Riccardo Ricci - info @ metaseen . com - (rimesso online Ottobre 2019)
|